News and events
Filter by category:
A New Paradigm for Business Intelligence
21st Jul 2024
A New Paradigm for Business Intelligence
LAS VEGAS, NV (2024-07-21) – dRISK is thrilled to announce the launch of its
groundbreaking product, Edge, at Ai4 2024, North America’s largest artificial
intelligence industry event. The highly anticipated conference will take place from
August 12-14, 2024, at the MGM Grand in Las Vegas, NV.

dRISK started in 2019, winning over >$5M in government funding from the UK’s Centre for Connected and Autonomous Vehicles to build the ultimate driver’s test for self-driving cars. To do this they developed a truly massive knowledge graph for training and testing autonomous vehicles on their full necessary range of behavioural complexity, and especially the edge cases and “unknown unknowns” that constitute the biggest AI risks.
dRISK is now releasing the underlying technology for enterprise use. Edge is a cloud-based graph embedding environment which allows users to find hidden patterns – unknown unknowns – in literally any kind of data in moments. Data architects, quantitative analysts, AI engineers and even the C-suite have literally all their data at their fingertips.
Edge totally transforms deep analytical explorations, data migrations, “what-if” analyses, fusion of alternative datasets and general AI development. Somewhat like visions of code-less computing environments from the movies, every action in Edge can be accomplished by natural language or even moving data with your fingertips. Unlike any no-code framework before it, Edge is a complete replacement for scripting environments. dRISK believes that Edge may be the missing piece to unblock GenAI in delivering the massive enterprise value that the ecosystem has hoped for.

Founder and CEO, Chess Stetson will be giving a talk titled “A New Paradigm for Business Intelligence”, on Tuesday, August 13th, 12:25 – 12:35 PM at #114, presenting examples from Autonomous Vehicles, Finance, and Healthcare.
Automated Vehicles Bill and breakfast at 10 Downing Street
2nd Apr 2024
As a trusted advisor and thought leader to UK government, Chess was invited to breakfast at 10 Downing Street on the 25th March. He was there to talk to Ministers about Self Driving Technology which is at core of the Government’s plans for the future of transport and the UK’s mission to be a critical and innovative economy in the world and a science and technology superpower.

The UK Government is committed to ensuring the huge growth potential of this sector which could allow us to capture up to £42 billion of the global market and create 38,000 skilled jobs by 2035. To achieve this, the Government is taking forward the Automated Vehicles Bill, which will establish one of the world’s most comprehensive regulatory frameworks for self-driving vehicles, based on the international thought-leadership of the Law Commissions’ review. The Bill will provide the certainty and confidence that the private sector needs to unlock research, innovation, and investment across the whole of the UK. This comes in addition to Government investment in the self-driving sector with over £600 million in joint government and industry investment since 2015. dRISK have led two large projects and have been consortium partners in two further grant funded projects since 2019, providing safety assurance for the project, vehicle, route and passengers.
D-RISK – The World’s first true driving test for the self driving car – delivered Sep 2022. To do this dRISK aggregated several data types, from CCTV feeds to dashcam footage, structured and unstructured text, expert input on failure modes of AVs, insurance claims reports, police reports and even went to the public asking them what the weirdest thing they’ve experienced on the road was. dRISK fused these extremely rich data sets into the world 1st knowledge graph of what can go wrong on the UK’s roads.
Connector – an at-scale trial of on-demand self-driving vehicles with up to 13 electric vehicles providing passenger services that integrate with existing transport services within Cambridge.
SCALE – operates two mixed dual-purpose fleets of passenger and parcel carrying self-driving vehicles, servicing Birmingham International rail station, the NEC and Birmingham Business Park, and Coventry University estates operations.
DeepSafe – will commercialise ‘sensor real’ edge case data – a simulation of what an actual sensor would detect – together with AV training tools, for release in the UK and internationally after the project. As well as advancing self-driving systems, the grant aims to support innovation in industry, job creation, and investment, building the capacity to develop AV technology in the UK and export it to the rest of the world.
The event bought together representatives from Government, the self-driving industry and investors; building connections and laying the right foundations to catalyse investment in the UK self-driving sector. dRISK continues to offer its specialism in the testing, training and validation of ADAS and ADS stacks and its new product, Edge, an AI powered Data Insights tool.

Autonomy Mobility World Expo 2024 – dRISK wins AI and Mobility Data Startup of the year
2nd Apr 2024
What has a mine got to do with data?

dRISK attended the Autonomy Mobility World Expo 2024 event held in Paris in March, showcasing our new Edge product which is an AI Powered Data Insights tool, originally launched at CES 2024 in Las Vegas three months prior to this event. The tool was entered into the Start up challenge in the AI and Mobility Data category. Now in its 9th year, the Autonomy Mobility Startup Challenge – formerly known as Funding the Movement – recognises and celebrates startups that are bringing new innovations and enabling transformation in the mobility sector. It is open to startups presenting projects, products, solutions, ideas, or prototypes focusing on any of the Themes in our mobility ecosystem. 18 startups were pre-selected to pitch on the AMWE stage and of these 7 would receive a prize and international recognition.

Pitching was tough with some serious competition from great technology solutions and some very creative speakers. Rav, COO at dRISK opted to focus on the problem dRISK’s Edge tool solves. The example used was the gold mining industry. For every 1g of gold found in a mine, 1 tonne of rock must be mined. Imagine keeping and storing the 1 tonne of rock as it contains 1g of gold. Surely the most successful mines would be those who separated the gold from the rock the most efficiently and fastest. Understanding what was valuable and what was not.

Modern businesses know just how important data is. It is effectively the new gold. Collecting and storing this can be expensive and often it is stored in silos with no interconnection between databases. The true value of the data held, can never be obtained. dRISK’s Edge tool is able to fuse enterprise scale datasets of any type. It intelligently connects data points between datasets and then goes on to find patterns, outliers and anomalies in the datasets. It finds the unknown, unknowns in your data and answers the questions you didn’t even know to ask. The tool does this without a single line of code and using a customized LLM you can ask questions of your data in plain english.
The nine esteemed judges at AMWE voted for dRISK to win startup of the year in the AI and Mobility Data field.


dRISK Launches Cloud-based Product to Control AI Through Data
8th Jan 2024
At CES 2024, dRISK is launching a new product for interacting with AI. For the first time, users will be able to leverage complex data structures across multiple data sources and fuse the data into ad-hoc graph databases without the need of ETL. Best of all, users can leverage AI to ask any question of the data, find unknown unknowns, make sophisticated predictions and more, all without a line of code.
Edge is a completely new, hyperdimensional, no-code, graph-based visuospatial interaction environment in which humans and AIs can interact. dRISK’s technology has been used successfully in the hypercomplex Autonomous Vehicle industry for years. The Edge platform has allowed dRISK’s AV customers to whitebox their AI, remove bias, and ensure functionality on mission-critical tasks. dRISK is now opening this groundbreaking software to the general public, who can join a wait list here.
dRISK’s enterprise customers gain access to the same capabilities scaled up for the enterprise and with massive data enrichment, providing AI-enabled ETL and data fusion, at-their-fingertips access to valuable insights across even the most complex datasets, and total observability and no-code queries.
For more information please contact: [email protected]. Or enquire using the waitlist sign up form here.
Notes to editors:
- dRISK, a California- and London-based company with a history of developing deep tech solutions for Autonomous Vehicle training, is launching a public-facing version of its AI interaction product, Edge, at CES 2024.
- dRISK has offices in London, England and Pasadena, California. Their customers include the world’s leading Autonomous Vehicle developers. Their investors include Foresight Williams, Okapi Ventures, and SaaS Ventures.
- dRISK also lead the DeepSafe consortium, along with partners rFpro, Claytex, DG Cities and Imperial College London and with funding from the UK government department the Centre for Connected and Autonomous Vehicles (CCAV), to solve the last remaining hurdles standing in the way of safe, economical autonomous vehicles.

‘DeepSafe’ a dRISK led consortium have been awarded £2m to unlock next phase in the evolution of safe, autonomous vehicles
5th Sep 2023
A team of leading academics and researchers in AI, simulation, strategy and engagement firms has been awarded £2 million in CCAV funding to advance DeepSafe, the next stage in the commercialisation and deployment of self-driving vehicles.
The dRISK.ai-led consortium of DG Cities, Imperial College London, Claytex and rFpro will unlock a barrier in the supply chain – together, they will develop the simulation-based training needed to train autonomous vehicles (AVs) to handle ‘edge cases’, the rare, unexpected driving scenarios they must be prepared to encounter on the road.
DeepSafe will commercialise ‘sensor real’ edge case data – a simulation of what an actual sensor would detect – together with AV training tools, for release in the UK and internationally after the project. As well as advancing self-driving systems, the grant aims to support innovation in industry, job creation, and investment, building the capacity to develop AV technology in the UK and export it to the rest of the world.

Rav Babbra, dRISK.ai: “There are currently bottlenecks in the technology sector that are inhibiting deep-learning using simulation. These are what the DeepSafe consortium aims to resolve. Together, we will enable the performance improvements in AI perception needed to develop safer and more reliable autonomous driving behaviours.”
Pilot studies have demonstrated that AVs can handle the straightforward situations that make up 99% of everyday driving experiences. However, it is more difficult to train vehicles to deal with ‘edge cases’, the rare and unusual events that can happen on the road. Failure to understand an edge case can result in unreliable, unsafe behaviour, such as phantom braking, lane-keeping failure and collisions.
To train AVs to safely navigate these situations, they have to be identified and simulated. Part of the team’s previous project, DRISK focused on engagement, using the public’s driving experiences to crowd source these rare events and build scenarios – a process that also served to raise awareness of the technology and give an insight into consumer barriers to autonomy.
However, such real-life training data is limited. There is a widely recognised need for simulation and synthetic data, but the artificial data currently available is not sufficiently ‘sensor-real’ for AI trained by simulation to improve its perception and decision-making. DeepSafe brings together leaders in the simulation supply chain to resolve these synthetic data issues to enable the successful simulation-based training vital to develop safe, reliable self-driving services.
In addition, DeepSafe will establish the definitive toolchain to realistically represent the dynamics of vulnerable road users, and will conclusively answer ‘how close does simulation have to be?’ to train an ADS (Automated Driving System) to outperform a human driver by an order of magnitude.
Complementing the new data and simulation techniques will be a novel “AI Canvas” – a new kind of software for understanding the weak points of learned systems, backtracking failure modes to their source, and correcting them with new training data. With this complete toolchain, the project hopes to finally unblock the way to safe and economical AV deployments.
Balazs Csuvar, Head of Delivery at DG Cities: “A lot of our focus within the consortium is on user perception – how can we make sure that people feel safe in self-driving cars, how can they be reassured by and trust the work that has gone into the testing. Lane-keeping assist and other ADAS features (in some way precursors to fully autonomous driving) already influence the way we drive, without people actually knowing how well they perform. We will work on understanding how best to communicate to drivers this crucial information and use it to outline how autonomous systems should be benchmarked as well.”
More details here: https://zenzic.io/news/announcing-the-13-successful-cam-supply-chain-uk-projects/

dRISK awarded share of £81M to commercialise Connected and Autonomous Vehicles in UK
1st Feb 2023
The UK government is awarding almost £42 million to 7 projects through the Centre for Connected and Autonomous Vehicles (CCAV) Commercialising Connected and Automated Mobility (CAM) competition. Industry consortia will match the public grant to around £81 million and will be expected to demonstrate a sustainable commercial service by 2025. dRISK play a pivotal and safety critical role in two of these projects:
Project Cambridge Connector – Greater Cambridge Partnership – £17.4 million to trial on-demand, self-driving taxis, to complement existing transport services in parts of Cambridge.
Multi-Area Connected Automated Mobility – Conigital – £15.2 million to establish a remote driving control hub, to oversee self-driving vehicles operating in Solihull and Coventry, with the NEC and local councils.
Multi-Area Connected Automated Mobility – Conigital
£8.3 million awarded by government, matched by industry to a total £15.2 million. This project looks to establish a self-driving vehicle operation around various parts of the West Midlands, underpinned by a centralised, Remote Monitoring Teleoperation (RMTO) centre. The RMTO centre will be where the project’s self-driving vehicles are monitored and (when required) controlled from, using 5G connectivity. The project aims to make self-driving vehicle operations commercially viable, and offset current technology and driver costs.
Project partners include: National Exhibition Centre Ltd, Direct Line Group, Coventry City Council, Solihull Metropolitan Borough Council, University of Warwick, Coventry University, dRISK, IPG Automotive and West Midlands Combined Authority
Project Cambridge Connector – Greater Cambridge Partnership
£8.7 million awarded by government, matched by industry to a total £17.4 million. The Cambridge project will pilot on-demand self-driving vehicles. Up to 13 electric vehicles will provide passenger services that integrate with existing transport services within Cambridge across two sites: Cambridge University’s West Cambridge Campus and the Cambridge Biomedical Campus.
The lead partner Greater Cambridge Partnership is the local delivery body for a City Deal with central government, and working in partnership with Cambridgeshire County Council, Cambridge City Council, South Cambridgeshire District Council and University of Cambridge.
Project partners include: dRISK, Stagecoach East, IPG Automotive UK, Conigital Ltd and Gamma Energy as well as the Greater Cambridge Partnership.
UK Business Secretary Grant Shapps said:
“In just a few years’ time, the business of self-driving vehicles could add tens of billions to our economy and create tens of thousands of jobs across the UK. This is a massive opportunity to drive forward our priority to grow the economy, which we are determined to seize”.
he went on to say
“The support we are providing today will help our transport and technology pioneers steal a march on the global competition, by turning their bright ideas into market-ready products sooner than anyone else”.
UK Transport Secretary Mark Harper said:
“Self-driving vehicles including buses will positively transform people’s everyday lives – making it easier to get around, access vital services and improve regional connectivity”.
“We’re supporting and investing in the safe rollout of this incredible technology to help maximise its full potential, while also creating skilled jobs and boosting growth in this important sector”.
CEO and Founder of dRISK, Chess Stetson said : ” Following the successful delivery of the World’s first true driving test for Self-driving cars to the UK government in September 2022, dRISK are honoured and eager to use this technology to facilitate the next generation of truly safe, truly performant Autonomous Vehicle deployments for the public good”.
Full press release here.

dRISK features in Business Cloud’s top 50 Innovative Transport Tech companies list for 2022
8th Dec 2022
dRISK are delighted to have been featured in the Business Cloud Transport Tech top 50 innovators of 2022.
The company has been recognised as creating innovative transport technology solutions for our work testing, training and validating on Edge cases gathered from all over the globe and it is a true recognition of the work the team have put in to scale our products and services in response to customer demand in both the United States, but also in the UK, mainland Europe and further afield via our outreach missions.
We are proud to have been selected amongst companies who we know and work with on a regular basis within the UK connected and autonomous vehicle eco-system.
The ∂RISK team look forward to continuing successes within the UK as well in the USA, via our US office in Pasadena (CA), with new product offerings, solutions and thought leadership in the Autonomous vehicle safety space, to be released soon.


dRISK awarded Edge Innovator of the year 2022
14th Oct 2022
dRISK were awarded Edge innovator of the year 2022 at the Edge Computing World conference in Santa Clara, Silicon Valley. Our Transport Systems specialist, Kiran Jesudasan collected the award in person and gave the audience a view of the work dRISK are pushing toward in the relatively new world of Edge computing. Kiran described how dRISK specialises in collecting Edge cases, which are the countless risky vehicle scenarios which are individually unlikely, but together make up all the risk. These are used by the company to test, train and validate autonomous vehicles. dRISK collect millions of hours of data from many sources from all over the world. One of our largest data sources is CCTV. The data we collect is mostly made up of perfectly normal driving behaviors and does not contain the edge cases we are interested in. At this time we collect all the data and store this in our servers prior to interrogating it to find the valuable edge cases. Money and time is lost in sending the non-valuable data back and storing this. Kiran spoke about how Edge computing would mean that CCTV cameras themselves would be upgraded to have capabilities themselves to decide what was an Edge case and what was not, at source. In this way, only the valuable data would be sent back to dRISK and we would save on time and financial burden, allowing us to collect yet more data and edge cases to make self driving vehicles safer.

Edge computing means that powerful decision making processes are no longer limited to servers in offices, but can now be deployed where they are needed and useful. dRISK are working with suppliers such as Nvidia to develop Edge computing capabilities, which in this case will allow us to collect more accidents and near misses making future self driving vehicles safer and thus, commercially viable.
CEO & Founder of dRISK, Dr Chess Stetson was interviewed by Edge Computing World and the article can be seen here.
Tell us a bit about yourself – what led you to get involved in the edge computing market and dRISK
My background is in computational neuroscience, and I spent a long time realizing that most of the value in data was in the unexpected places or edge cases. dRISK builds tools for training and testing autonomous vehicles on edge cases, and perhaps ironically does so with a Knowledge Graph called dRISK Edge, which both stores knowledge, edge cases, and works on a distributed database, all of which have have either a semantic or technical relationship to edge computing. But in the strictest sense of edge computing, our heavy use is coming up, as the object detection feeding our knowledge graph starts to run on edge devices rather than centrally. Moreover, the advent of AVs will see more V2V, X2V and V2X communication requiring super low-latency, which will move decisionmaking to the edge.

What is it you & your company are uniquely bringing to the edge market?
We are bringing a dramatically new way to train and test autnomous vehicles on edge cases and, as I say above, it’s not just window dressing to say that all AVs will have an edge computing component in the near future.
Tell us more about the company, what’s your advantages compared to others on the market, who is involved, and what are your major milestones so far?
We are by far the most comprehensive resource for training and testing on edge cases, and our customers enjoy a 6x or greater improvement in safety performance.
How do you see the edge market developing over the next few years?
I don’t think it’s controversial to say that centralized heavy compute is expensive and subject to burdensome latency. That will change as a large variety of distributed computing resources take over the load where it’s needed.
How do you see the edge market developing over the next few years?
We focus on AVs, so I’ll keep my answers contained there. See above — V2X, V2V, X2V all mean edge computing. But we also work on large distributed graph databases, which are ideal for distributed computing, and it’s easy to see how edge compute could take graph computing all the way to the periphery of the computing process with ease.

dRISK Demonstrates Physically Based Edge-Case Testing
20th Sep 2022
….in NVIDIA DRIVE Sim
The future of autonomous vehicles (AVS) relies on simulation. Equally important is knowing what scenarios to simulate. Edge cases are high-risk scenarios, each of which is individually unlikely, but collectively, can make up all the risk of daily driving. Edge cases can be anything from a child following a ball into the street to a head-on collision with a car suddenly veering into your lane.
A dRISK edge case detailing a dangerous passing maneuver from an oncoming vehicle recorded from a dRISK exclusive source, and replicated in NVIDIA DRIVE Sim with some domain-specific modifications.
AV developers will soon be able to test and retrain their AV stacks on these and many more edge cases using the NVIDIA DRIVE Sim platform. DRIVE Sim, which is built on NVIDIA Omniverse, is an end-to-end platform architected from the ground up to run large-scale, physically accurate multi-sensor simulation delivering a safe, scalable and cost-effective way to bring self-driving vehicles to the roads. DRIVE Sim, already shown to be able to closely match real-life scenarios, will now further recreate dRISK’s knowledge graph of edge cases. Developers testing their AV stacks with DRIVE Sim will be able to validate and retrain their own parameters on the world’s trickiest scenarios.
Following a major grant from the UK government to build the ultimate driver’s test for self-driving cars, dRISK has spent years mapping out the landscape of edge cases from a huge heterogeneity of sources – from CCTV to accident reporting, to first-principles failure mode analysis led by NASA engineers.
Testing, validating and retraining on edge cases before deployment can prevent most of the accidents autonomous vehicles are experiencing right now. As dRISK demonstrated at NVIDIA GTC 2021, developers can achieve a 6x performance improvement on detecting high-risk scenarios by retraining on edge cases, while continuing to get the “center cases” (normal driving) for free.
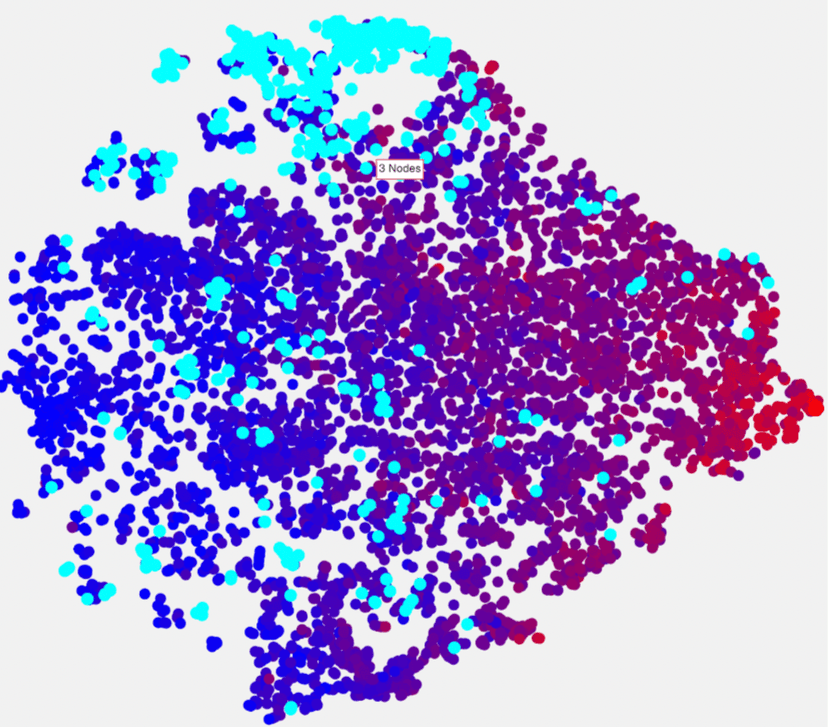
Aggregation methods for dRISK’s edge cases from real-life data, clustered and assembled into a knowledge graph, a data structure flexible enough to capture the heterogeneity of everything that can go wrong on the road.
NVIDIA DRIVE Sim has the ingredients to achieve a major goal in AV development—to fully test, validate and even retrain and improve these vehicles in simulation. Chess Stetson, CEO of dRISK, says, “NVIDIA DRIVE Sim is the simulation platform we’ve all been waiting for, which can fully resolve the kind of depth we need to do physically accurate simulations in real time.”
NVIDIA is enabling the next generation of software-defined autonomous systems to OEMs.
One of the most important reasons for physically accurate simulations is to understand the AV perception. failures that would cause an oncoming collision to be missed. In the following clip, DRIVE Sim replicates a T-bone scenario from dRISK’s knowledge graph, complete with partial occlusions. DRIVE Sim makes the hazardous vehicle obvious to the human eye, as it would be in real life. But it’s hard for a standard computer-based object detection system to pick up (in this case, Mask RCNN).
Stetson notes, “The human visual system, evolved over millions of years, is highly adapted to avoid things that are going to hurt or kill you, which it does using extensive motion cues.”
This is in stark contrast to current object detection, which is overwhelmingly based on single-frame object localization and classification, rather than the kind of motion detection that could allow for quick reactions necessary to avoid this kind of T-bone scenario. But as AVS have more exposure to edge cases in a full sensor-real simulation platform, they will indeed be able to develop the capabilities to handle these kinds of high-risk, fast-reaction-time scenarios.
An upcoming transverse collision, replicated in high fidelity in NVIDIA DRIVE Sim. This kind of edge case is critical for testing AV reactions to high-risk scenarios in DRIVE Sim’s real-time sensor environment. Note that in this case, a common object detection framework (Mask R-CNN) misses the behavior most important to risk awareness in the scene, but that DRIVE Sim allows for the possibility of retraining AV perception to improve.
dRISK’s mission is to provide the largest, most diverse and realistic scenario database for testing autonomous vehicles. dRISK has been building this testing suite from a massive set of real-world data. Test sets are optimized for specific tasks, such as failure mode identification and curriculum learning for efficient Al training. dRISK and its customers have shown 6-20x improvements in the ability to recognize and contend with high-risk scenarios, though never yet in a simulation environment as capable as NVIDIA DRIVE Sim.
Working relationship:
NVIDIA has licensed dRISK’s scenario data derived from real life, which is organized to be evenly distributed across the landscape of risk, for NVIDIA’S AV development uses and to complement its scenario provision efforts.
As a DRIVE Sim ecosystem partner, dRISK is making its scenario knowledge graph and tools for exploring the space of center and edge cases available to any DRIVE Sim customer.
Capabilities and Goals:
dRISK with DRIVE Sim can efficiently:
– Replicate real-life edge cases, sourced from real-life data, at large scale
– Find failure modes in simulation before vehicles are on the road
– Retrain object detection to have improved performance detecting sources of high risk
In addition to delivering high-risk, true-to-life scenarios for NVIDIA’s use in validating AV stacks against edge cases, dRISK is also exploring the capacity to deliver these capabilities to the wider AV space via a combined use of dRISK’s edge case manifold and NVIDIA AV tools.
Authors: dRISK Team (Chess Stetson, Ph.D., Federico Arenas Lopez, Lorenzo Niccolini, Nils Goldbeck, Ph.D.)
Other contributors: Philipp Hermann, Wael Elhaddad, Carène Kamel

Automatic Driving Assistance Systems (ADAS) – Is this technology safe?
12th Sep 2022
How can simulation be used to determine where ADAS features can be improved? The prestigious Institute of engineering and technology (IET) contacted dRISK to ask us help them test Advanced Driver Assistance Systems (ADAS). ADAS features are becoming more common place on the new vehicles, these include Automatic Emergancy Braking (AEB), Automatic Lane Keeping System (AKLS) and Automatic Cruise Control (ACC). ADAS functionality is seen as the first baby steps towards ever increasing driver aid, culminating in fully autonomous vehicles.

We demonstrated our latest set (test two after our Tesla spoofing rig experiment which can be seen here) of testing to see if these driver assistance systems can be relied on. We pressure tested the ADAS functionality on a SAE level 2 autonomous vehicle’s optical perception system by presenting it with challenging situations that could happen in real life.
Do these systems help the driver? Should vehicles equipped with these features cost less to insure as they might be less likely to be involved in an accident? Can the driver be reliant on these features? Watch the video below:
Testing was carried out on a private road in September 2021. No one was hurt in the experiment.

- © 2026, Copyright dRISK
- Privacy Policy
- HTML Sitemap
- Sitemap